Radar cu unde continue cu frecvență modulată

recepționat
Ilustrație 1: Determinarea distanței cu un radar FMCW

Radar cu unde continue cu frecvență modulată
Radarul cu unde continue cu modulație de frecvență (sau Frequency-Modulated Continuous Wave radar = radar FMCW) este un tip special de senzor radar care emite un semnal de transmisie continuu, ca un radar cu unde continue (radar CW). Spre deosebire de acest radar CW, un radar FMCW își poate schimba frecvența de operare în timpul măsurătorii: adică semnalul transmis este modulat în frecvență. Aceste modificări de frecvență fac posibilă, din punct de vedere tehnic, măsurarea suplimentară a timpului dintre emisie și recepție.
Radarele simple cu unde continue (radarele CW) au dezavantajul că nu pot măsura distanța din cauza lipsei unei referințe temporale. Cu toate acestea, o astfel de referință de timp pentru măsurarea distanței obiectelor staționare poate fi generată cu ajutorul modulației de frecvență a semnalului transmis. Prin această metodă, se emite un semnal care își schimbă periodic frecvența. Dacă se recepționează un semnal de ecou, atunci această schimbare de frecvență are o decalare a timpului de tranzit Δt, ca în cazul unui radar cu impulsuri.
Caracteristicile de bază ale unui radar FMCW sunt:
- Capacitatea de a măsura distanțe foarte mici față de țintă (domeniul minim de măsurare se află în domeniul lungimilor de undă);
- Distanța și viteza radială pot fi măsurate simultan;
- Precizie foarte mare a măsurării domeniului de măsurare;
- Prelucrarea semnalului se realizează după amestecare într-o gamă de frecvențe joase, ceea ce simplifică considerabil circuitele;
- Fiabilitate operațională ridicată datorită absenței impulsurilor de mare putere.
Principiul de măsurare
Caracteristica unui radar FMCW este:
- măsurarea distanței se face prin compararea frecvenței semnalului recepționat cu o referință (de obicei direct semnalul transmis).
- durata perioadei de modulație T este considerabil mai mare decât timpul necesar Δt (timpul dintre emisie și recepție, timpul de tranzit) pentru domeniul de măsurare a distanței instalat.
.print.png)
.png)
(1)
- c0 — viteza luminii = 3·108 m/s
- Δt — timpul de tranzit [s]
- Δf — diferența de frecvență măsurată [Hz]
- R — distanța antenă - obiect (sau sol) [m]
- df/dt — abaterea de frecvență pe unitate de timp
Dacă variația de frecvență este liniară pe o gamă largă, distanța poate fi determinată în această gamă printr-o simplă comparație de frecvență Δf. Datorită faptului că numai mărimea diferenței de frecvență este măsurabilă, într-un scenariu static, rezultatele sunt egale cu o variație descrescătoare a frecvenței pentru o variație de frecvență care crește liniar.
În cazul în care obiectul reflectant are o viteză radială în raport cu antena de emisie/recepție, semnalului de ecou i se impune o frecvență Doppler fD (cauzată de viteză), în plus față de frecvența de diferență Δf față de frecvența curentă de emisie (cauzată de timpul de tranzit). Radarul măsoară apoi, în funcție de direcția mișcării și de direcția modulației liniare, numai suma sau diferența dintre frecvența diferențială ca purtătoare a informațiilor privind distanța și frecvența Doppler ca purtătoare a informațiilor privind viteza. Dacă obiectul reflector se îndepărtează de radar, atunci frecvența semnalului de ecou este redusă cu frecvența Doppler. Dacă măsurarea se efectuează acum cu un dinte de fierăstrău, așa cum se arată în figura 1, atunci semnalul recepționat nu este doar deplasat spre dreapta cu timpul de tranzit, ci și în jos cu frecvența Doppler. Frecvența diferențială măsurată Δf este mai mare decât ar trebui să fie în funcție de frecvența Doppler fD, conform timpului de tranzit. În cazul în care măsurarea se face cu un front descrescător al unui dinte de fierăstrău (a se vedea figura 3), atunci frecvența Doppler fD se scade din variația de frecvență cu timpul de tranzit.
Distanţa maximă și rezoluţia în distanţă
Puterea de rezoluție poate fi determinată prin selectarea adecvată a deviației de frecvență pe unitate de timp, iar domeniul maxim posibil de măsurare poate fi determinat de durata creșterii frecvenței. Durata creșterii liniare a frecvenței determină distanța maximă posibilă de măsurare unică. Gradul de abrupt al creșterii liniare determină puterea de rezolvare și precizia măsurării distanței. Creșterea maximă a frecvenței și panta pot fi variate în funcție de posibilitățile circuitului realizat din punct de vedere tehnic.
Distanța maximă posibilă este determinată de suprapunerea temporală necesară a semnalului recepționat cu semnalul transmis. Aceasta este de obicei mult mai mare decât domeniul energetic, adică limitarea prin atenuarea în spațiul liber.
Pentru capacitatea de rezoluție a razei de acțiune a unui radar FMCW (ca și în cazul așa-numitului radar chirp), lățimea de bandă BW a semnalului transmis este decisivă. Aceasta este pur și simplu diferența dintre frecvența de tăiere superioară și inferioară a semnalului transmis. Posibilitățile transformării Fourier rapide sunt limitate de limitele de timp (aici de durata dintelui de fierăstrău Τ ). Puterea de rezoluție a radarului FMCW este, prin urmare, determinată de modificarea frecvenței care are loc în această limită temporală.
.print.png)
.png)
(2)
- ΔfFFT — cea mai mică diferență de frecvență măsurabilă
- d(f)/d(t) — abaterea de frecvență
- fup — frecvența limită superioară
- fdwn — frecvența limită inferioară
Reciprocul duratei impulsului în formă de dinte de fierăstrău duce astfel la cea mai mică frecvență detectabilă posibilă. Aceasta poate fi introdusă în formula (1) ca |Δf | și conduce la o rezoluție a razei de acțiune a radarului FMCW. Cu toate acestea, devine problematic faptul că durata dintelui de fierăstrău trebuie să fie, de asemenea, suficientă ca timp pentru o transformare Fourier. Cu cât Transformarea Fourier rapidă poate fi aplicată mai mult timp, cu atât rezultatul va fi mai precis. Acest lucru depinde în principal de lățimea de bandă: Cât timp poate fi aplicată această modificare de frecvență pe unitate de timp d(f)/d(t) fără a părăsi limitele benzii de frecvență utilizate. Alte restricții de timp pot fi cauzate de suprapunerile nefavorabile (prea scurte) ale marginilor dinților de fierăstrău utilizați pentru măsurare.
De exemplu, un radar cu o creștere liniară a frecvenței pe o durată de 1 ms are, teoretic, o rază maximă de măsurare neechivocă posibilă în timp de mai puțin de 150 km. Acest lucru rezultă din suprapunerea neapărat rămasă a semnalului transmis cu semnalul de ecou (a se vedea figura 1) pentru a măsura o frecvență diferențială. În cele mai multe cazuri, acest interval de măsurare nu poate fi niciodată atins în termeni de energie. Acest lucru lasă suficient timp pentru o măsurare a frecvenței diferențiale.
Dacă abaterea maximă de frecvență a modulației transmițătorului este de 250 MHz, rezultă o diferență de timp de 4 ns pentru o diferență de frecvență de 1 kHz. Acest lucru corespunde unei rezoluții a distanței de 0,6 m.
Acest exemplu arată în mod impresionant avantajul radarului FMCW: un radar cu impulsuri trebuie să măsoare această diferență de timp de tranzit de 4 ns, ceea ce înseamnă un efort tehnic considerabil. O diferență de frecvență de 1 kHz, pe de altă parte, este mult mai ușor de măsurat în domeniul audio.
Ca în general în cazul oricărui radar, rezoluția unghiulară a radarului FMCW depinde de directivitatea (lățimea de înjumătățire) a antenei utilizate.
Șablon de modulare

Ilustrație 2: Modele de modulație comune pentru un radar FMCW
Ilustrație 2: Modele de modulație comune pentru un radar FMCW
Sunt posibile mai multe modele de modulație, care pot fi utilizate în diferite scopuri de măsurare:
- Modulație dinte de fierăstrău
Această modulație este utilizată pentru o gamă de măsurare relativ mare (distanță maximă) cu o influență neglijabilă a frecvenței Doppler (de exemplu, pentru un radar de navigație maritimă). - Modulație triunghiulară
Această modulație permite o separare simplă a frecvenței diferențiale Δf de frecvența Doppler fD - Modulație cu undă pătrată (modulație simplă cu deplasare de frecvență,
FSK)
Această modulație este utilizată pentru măsurarea foarte precisă a distanțelor în apropiere prin compararea în fază a ambelor frecvențe ale semnalului de ecou. Aceasta are dezavantajul că semnalele de ecou ale mai multor ținte nu pot fi separate unele de altele și că această metodă permite doar o distanță de măsurare univocă mică. - Modulația scării
Măsurătorile interferometrice extind domeniul de măsurare neechivocă.li> - Modulație sinusoidală
În trecut, au fost utilizate și forme de modulare sinusoidală. Acestea ar putea fi realizate pur și simplu prin utilizarea unui motor pentru a roti o placă de condensator în camera de rezonanță a oscilatorului transmițătorului. S-a utilizat apoi numai partea relativ liniară a funcției sinusoidale din apropierea trecerii pe zero.
Schimbare de frecvență liniară în formă de dinți de fierăstrău
În cazul unei modificări liniare de frecvență în formă de dinte de fierăstrău (a se vedea imaginea 1), semnalul de ecou este deplasat în timp (adică spre dreapta în imagine) cu timpul de tranzit. Acest lucru are ca rezultat o diferență de frecvență între frecvența de transmisie curentă și semnalul de ecou întârziat, care reprezintă o măsură a distanței obiectului reflectorizat. O frecvență Doppler care apare ar schimba acum frecvența întregului semnal de ecou, fie în sus (mișcare spre radar), fie în jos (mișcare de îndepărtare de radar).
Cu această formă de modulație, receptorul nu are cum să separe cele două frecvențe. Prin urmare, frecvența Doppler va apărea doar ca o eroare de măsurare în calculul razei de acțiune. Atunci când se alege o abatere optimă a frecvenței, se poate lua în considerare încă de la început faptul că frecvențele Doppler care trebuie așteptate sunt cât mai mici posibil în comparație cu puterea de rezoluție sau, cel puțin, că eroarea de măsurare rămâne cât mai mică posibil.
.print.jpg)
recepționat
Ilustrație 3: Interrelații cu modulația triunghiulară
.png)
Acesta va fi cazul, de exemplu, al radarelor de navigație maritimă: Ambarcațiunile se deplasează în zona de coastă cu o viteză limitată, probabil cu maximum 10 metri pe secundă una față de cealaltă. Astfel, în banda de frecvență a acestor radare (de obicei, banda X), frecvența Doppler maximă așteptată este de 666 Hz. În cazul în care procesarea semnalului radar utilizează o rezoluție de kilohertzi pe metru, atunci această frecvență Doppler este neglijabilă. Un radar de navigație maritimă FMCW de pe un aerodrom ar avea dificultăți în a vedea aceste aeronave la vitezele de decolare și aterizare de până la 200 m/s care se produc acolo, deoarece eroarea de măsurare datorată frecvenței Doppler poate fi mai mare decât distanța care trebuie măsurată în timpul unei apropieri. Semnul țintă ar trebui, teoretic, să apară pe ecran la o distanță negativă, adică înainte de începerea devierii.
Schimbare de frecvență triunghiulară
recepționat
Ilustrație 3: Interrelații cu modulația triunghiulară
Cu o schimbare de frecvență triunghiulară, se poate face o măsurare a distanței atât pe frontul de creștere, cât și pe cel de scădere. Un semnal de ecou este deplasat spre dreapta în imagine în raport cu semnalul transmis curent, în funcție de timpul de tranzit. Fără o frecvență Doppler, valoarea diferenței de frecvență Δf pe frontul crescător este egală cu măsurarea pe frontul descrescător.
O frecvență Doppler deplasează semnalul ecografic din imagine în înălțime. Suma diferenței de frecvență Δf și a frecvenței Doppler fD apare pe frontul ascendent, în timp ce diferența dintre cele două frecvențe apare pe frontul descendent. Acest lucru oferă posibilitatea de a determina distanța exactă în ciuda deplasării de frecvență datorate frecvenței Doppler, care constă în media aritmetică a celor două măsurători. În același timp, frecvența Doppler exactă poate fi, de asemenea, determinată din ambele măsurători. Diferența dintre cele două frecvențe diferențiale are ca rezultat dubla frecvență Doppler. Cu toate acestea, deoarece ambele frecvențe diferențiale nu sunt disponibile simultan, această comparație necesită procesarea digitală a semnalelor.
Frecvența Doppler ajustată la frecvența Doppler pentru determinarea distanței, precum și frecvența Doppler a unei ținte în mișcare se calculează în conformitate cu:
.print.png)
.png)
(3),(4)
- f (R) — frecvența ca măsură pentru măsurarea distanței
- fD — frecvența Doppler ca măsură pentru măsurarea vitezei
- Δf1 — diferența de frecvență pe frontul de creștere
- Δf2 — diferența de frecvență pe frontul descendent

Ilustrație 4: Ținte fantomă, soluție grafică

Ilustrație 4: Ținte fantomă, soluție grafică
Frecvența f (R) poate fi apoi înlocuită cu |Δf | în formula (1) pentru a calcula distanța exactă.
Cu toate acestea, această metodă are dezavantajul că, în cazul mai multor obiecte reflectante, frecvențele Doppler măsurate nu pot fi atribuite în mod clar unei ținte. Atribuirea unei frecvențe Doppler greșite unei ținte aflate la o distanță greșită poate duce la apariția unor ținte fantomă. Figura 4 prezintă o soluție grafică. Poziția unei prime ținte rezultă din funcțiile [-Δf1]1 + fD, precum și [+Δf2]1 - fD. Intersecția celor două linii drepte reprezintă poziția țintei 1. Dacă se adaugă o a doua țintă ([……]2), ambele perechi de linii drepte dau un total de patru puncte de intersecție, dintre care două sunt ținte fantomă. Poziția acestor ținte fantomă depinde, de asemenea, de panta formei de modulare. Astfel, problema poate fi rezolvată prin cicluri de măsurare cu diferite abrupturi ale marginilor: sunt afișate doar acele ținte ale căror coordonate indică aceeași poziție în ambele cicluri de măsurare.
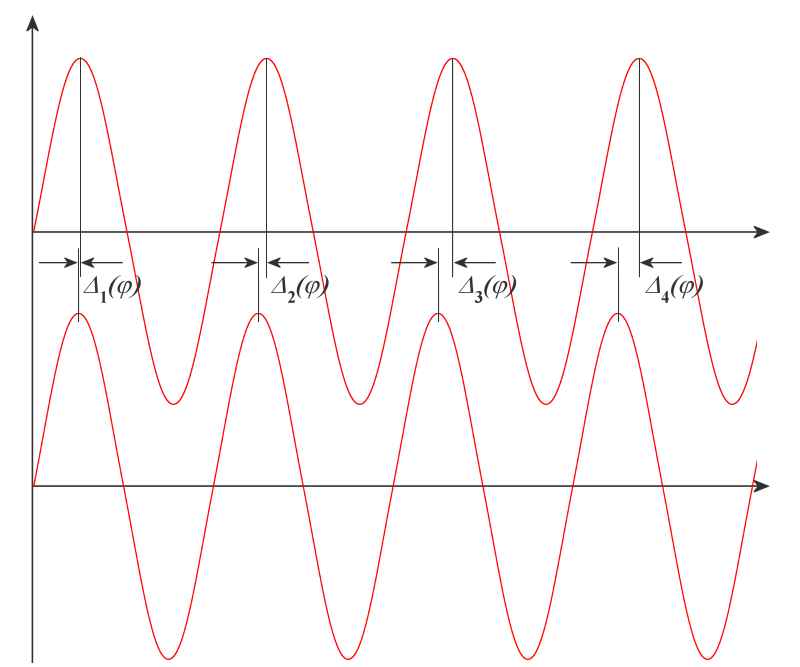
Ilustrație 5: Diferența de fază Δn(φ) este o măsură a de câte ori lungimea de undă este distanța (drumul de ieșire și drumul de întoarcere).

Ilustrație 5: Diferența de fază Δn(φ) este o măsură a de câte ori lungimea de undă este distanța (drumul de ieșire și drumul de întoarcere).
Schimbare de frecvență dreptunghiulară
Această metodă se mai numește și radar FMCW (Frequency Shift Keying, FSK). Emisorul-receptor este pur și simplu comutat ciclic între două frecvențe de transmisie cu o tensiune cu undă pătrată. Există două moduri principale de procesare a semnalului de ieșire al transceiverului. Prima posibilitate este de a măsura timpul de funcționare a variației de frecvență. La ieșirea transmițătorului-receptor apare un semnal a cărui înveliș este un impuls, cu o durată a impulsului ca măsură a distanței. Cu toate acestea, această măsurătoare este o măsurătoare pur temporală ca în cazul radarului cu impulsuri și, prin urmare, este fie inexactă, fie foarte complexă din punct de vedere tehnologic.
O a doua posibilitate este de a compara poziția de fază a semnalelor de ecou de ambele frecvențe. În cadrul baldachinului cu impulsuri, radarul funcționează cu prima frecvență de transmisie, iar în cadrul pauzei cu impulsuri cu a doua frecvență de transmisie. În aceste perioade de timp, în intervalul de milisecunde, radarul funcționează ca în cazul metodei radar CW. La ieșirea mixerului de coborâre (a se vedea schema bloc) apare o tensiune continuă ca o măsură a diferenței de fază dintre un semnal de recepție și semnalul de transmisie al acestuia. Diferența de fază dintre cele două semnale de ecou de diferite frecvențe de transmisie (din punct de vedere tehnic: diferența de tensiune la ieșirea mixerului) este o măsură a distanței. Din nou, ambele semnale de ecou nu sunt prezente în același timp, valorile de tensiune trebuie să fie stocate digital.
Cu toate acestea, din cauza periodicității tensiunii sinusoidale, această metodă are doar o distanță de măsurare univocă foarte limitată, care rezultă din jumătate din lungimea de undă a diferenței de frecvență a celor două frecvențe de transmisie. O diferență de frecvență de 20 MHz are ca rezultat o distanță de măsurare unică de numai 15 m. Mai multe ținte aflate în apropiere nu pot fi separate, deoarece la ieșirea mixerului descendent poate fi măsurată o singură poziție de fază, care, în cazul mai multor ținte, se suprapune unei singure tensiuni de ieșire, unde, în cel mai bun caz, domină cea mai puternică țintă.
În cazul în care ambele metode de evaluare (temporală și de fază) sunt utilizate simultan, se poate face o determinare aproximativă a distanței prin intermediul evaluării temporale. Lungimea de undă completă poate fi apoi adăugată la rezultatul exact al evaluării de fază până când rezultatul este suficient de apropiat de distanța de la măsurarea timpului. Distanța de măsurare lipsită de ambiguitate a măsurătorii de fază este astfel eludată.
Modificarea frecvenței scărilor
În general, aici se aplică aceleași avantaje și dezavantaje ca și în cazul metodei care utilizează o modulație dreptunghiulară. Cu toate acestea, radarul FMCW funcționează acum cu mai multe frecvențe succesive. În fiecare dintre aceste frecvențe unice, se măsoară o poziție de fază. Cu toate acestea, distanța de măsurare neechivocă se mărește considerabil, deoarece acum trebuie repetate relațiile de fază între mai multe frecvențe pentru a crea ambiguități.
Această metodă devine foarte interesantă atunci când rezonanțele pentru frecvențe parțiale individuale pot fi observate pe neregularitățile obiectului reflector. Această metodă de măsurare este un domeniu al interferometriei.
Diagramă bloc

Ilustrație 6: Schema bloc a unui radar FMCW

Ilustrație 6: Schema bloc a unui radar FMCW (imagine interactiva)

Ilustrație 7: ART Midrange, un radar FMCW cu antene decalate separate pentru emisie și recepție.
Un radar FMCW cu rază scurtă de acțiune este format, în esență, din transmițător-receptor și o unitate de control cu microprocesor. Emisorul-receptor este un ansamblu compact și, de obicei, conține și antenele de emisie și de recepție, care sunt proiectate ca antene patch. Frecvența înaltă este generată de un oscilator controlat prin tensiune, care fie alimentează direct antena de emisie, fie a cărui putere este amplificată suplimentar. O parte din frecvența înaltă este decupată și trimisă la un mixer, care amestecă semnalul de ecou recepționat și amplificat în banda de bază.
Placa de control conține un microprocesor care controlează transmițătorul-receptor, convertește semnalele de ecou în format digital și asigură conexiunea cu un computer (de obicei prin cablu USB). Un convertor digital-analogic furnizează tensiunea de comandă pentru controlul frecvenței. Tensiunea de ieșire a mixerului este digitizată.
Din cauza procedurii (emisie și recepție simultane), un circulator de ferită trebuie să separe căile de emisie și recepție atunci când se utilizează o singură antenă. Cu toate acestea, cu antenele patch utilizate în mod obișnuit în prezent, utilizarea unor antene de emisie și recepție separate este mult mai ieftină. Antena de emisie și antena de recepție sunt montate direct una peste cealaltă ca rețele de antene pe un substrat comun. Direcția de polarizare este rotită cu 180° una față de cealaltă. Adesea, o placă de ecranare suplimentară reduce „diafonia“ directă (adică coplata directă a ambelor antene). Deoarece măsurarea se efectuează ca o diferență de frecvență între semnalul de emisie și cel de recepție, semnalul care rezultă din această cuplare directă poate fi suprimat datorită aceleiași frecvențe.
Într-o aplicație radar CW pură, trebuie procesată doar frecvența Doppler. Pentru un senzor radar FMCW care funcționează în banda K (aproximativ 24 GHz), aceasta conține doar frecvențe de până la un maxim de 16,5 KHz, în cazul în care trebuie detectate viteze de până la 360 km/h. Prin urmare, un procesor audio stereo simplu poate fi folosit aici ca un microprocesor, care este utilizat în număr mare, de exemplu, în plăcile de sunet pentru calculatoare de uz casnic. Chiar și în cazul metodei FSK (modulație dreptunghiulară), un astfel de procesor poate fi utilizat într-o măsură limitată.
În schimb, într-o aplicație radar FMCW pentru măsurarea distanței, aproape întreaga abatere de frecvență a transmițătorului trebuie să poată fi procesată și în receptor. Aceasta înseamnă că în semnalul recepționat se pot aștepta frecvențe de până la 250 MHz. Acest lucru are o influență semnificativă asupra lățimii de bandă a amplificatoarelor ulterioare și asupra frecvenței de eșantionare necesare a convertorului analog-digital. Acest lucru face ca placa de procesare a semnalului unui radar FMCW să fie considerabil mai scumpă decât cea a unui radar CW.
În prezent, pe piață există multe module radar FMCW sau senzori radar FMCW cu costuri reduse, care conțin un transmițător-receptor complet cu o rețea de antene patch integrată ca așa-numitul “Front-End“ al unei unități radar. Aceste module conțin de obicei cipul MMIC TRX_024_xx (a se vedea fișa tehnică) de la Silicon Radar cu o putere de ieșire de până la 6 dBm. Acest cip funcționează în banda K (24,0 … 24,25 GHz) și poate fi utilizat ca senzor pentru măsurarea vitezei și a distanței. Modulația sau modificarea frecvenței depinde de o tensiune de control și se realizează cu ajutorul unui circuit extern, fie o tensiune fixă (atunci dispozitivul funcționează ca un radar CW), fie este controlată de procesor și se bazează pe tensiunea de ieșire a unui convertor digital-analogic. Semnalul de ieșire al mixerului direct este de obicei furnizat ca un semnal I&Q și trebuie amplificat substanțial înainte de conversia analog-digitală.
Radar de imagistică FMCW

Ilustrație 8: Rețea de antene patch a unui radar de navigație FMCW în banda X

Această metodă radar este utilizată în așa-numitul Broadband-Radar™ ca radar de navigație pentru aplicații maritime. Cu toate acestea, în acest caz, baleierea frecvenței este oprită după atingerea distanței maxime posibile de măsurare. Prin urmare, semnalul transmis seamănă mai mult cu cel al unui radar cu impulsuri cu modulație intra-impuls. Această pauză nu are nicio influență directă asupra distanței maxime posibile de măsurare. Cu toate acestea, este necesar să se citească numeroasele date măsurate dintr-o memorie tampon și să se transmită fără pierderi prin intermediul unei linii de bandă îngustă către unitatea de afișare. Datorită modului său de funcționare - compararea frecvenței semnalului de ecou recepționat cu semnalul transmis, care este disponibil pe întreaga deplasare a intervalului - acesta rămâne un radar FMCW; este oprit doar pentru câteva milisecunde între ele, deoarece pur și simplu nu este nevoie de mai multe date.
O metodă de radar imagistic trebuie să efectueze o măsurare a distanței pentru fiecare punct individual de pe vizor. Astfel, rezoluția intervalului depinde mai mult de dimensiunea unui pixel al ecranului respectiv și de capacitatea procesării semnalului de a furniza datele la viteza necesară. Este necesar un ecran de înaltă rezoluție cu rezoluția necesară a pixelilor, unde cel puțin doi pixeli trebuie să fie disponibili pentru fiecare diferență de distanță, astfel încât, chiar dacă semnalul de măsurare se află exact între poziția a doi pixeli, ambii pixeli „se aprind“, iar dacă ținta se mișcă, numărul de pixeli utilizați și, prin urmare, luminozitatea relativă a țintei rămâne aceeași.
Cu Broadband-Radar™ menționat ca exemplu, cu o abatere de frecvență de 65 MHz pe milisecundă, sunt posibile valori bune.
- Pentru o măsurare neechivocă a timpului de zbor, se poate măsura doar o perioadă maximă de 500 µs (a se vedea figura 1), ceea ce corespunde unei distanțe de măsurare posibile de maximum 75 km.
- Abaterea de frecvență de 65 MHz pe milisecundă corespunde unei modificări de frecvență de 65 Hertz pe nanosecundă. Dacă următoarele filtre sunt capabile din punct de vedere tehnic să rezolve diferențe de frecvență de 1 kiloHertz, atunci este posibilă o măsurare a diferențelor de timp de zbor de 15 nanosecunde, ceea ce corespunde unei rezoluții a distanței de aproximativ 2 metri.
- Dacă frecvența maximă de diferență care poate fi procesată de circuitul de evaluare este de doi megahertzi, ceea ce este deja posibil cu cele mai simple microcalculatoare cu un singur cip, atunci pot fi măsurate distanțe de până la 4000 de metri. (Fără un microcontroler, 4000 de filtre individuale diferite ar trebui să fie operate în paralel).
- Din cauza metodei de măsurare, precizia măsurătorii este aproximativ egală cu rezoluția distanței și este limitată în continuare de capacitatea de rezoluție a scării ecranului.
Prin urmare, acest radar FMCW poate obține o rezoluție spațială ridicată cu un efort tehnic redus. Pentru ca un radar cu impulsuri să atingă aceeași rezoluție, acesta trebuie să poată măsura timpi de ordinul nanosecundelor. Acest lucru înseamnă că lățimea de bandă a transmițătorului acestui radar cu impulsuri trebuie să fie de cel puțin 80 MHz și că trebuie utilizată o rată de eșantionare de 166 MHz la digitizarea semnalului de ecou.
Radar FMCW fără imagistică

Ilustrație 9: Afișajul analogic al unui altimetru radar
Rezultatul măsurătorii acestui radar FMCW este afișat ca o valoare numerică pe un instrument cu acul arătător sau digitalizat ca afișare alfanumerică pe un ecran. Acest lucru înseamnă că poate fi măsurat doar un singur obiect dominant, dar cu o precizie foarte mare, până la un centimetru. Acest tip de măsurare a distanței este utilizat, de exemplu, în avioane ca radioaltimetru.
Chiar și un instrument cu indicator analogic poate servi ca afișaj pentru altitudinea radar a unui radar FMCW (a se vedea figura 9). Acest instrument cu bobină mobilă are o impedanță inductivă mai mare pentru frecvențe mai mari și, prin urmare, prezintă o deviație dependentă de frecvență, care, totuși, nu este liniară.
Sursa:
- «Теоретическое Основы Радиолокации», Под редакцией профессора Яковa Давидовичa Ширмана, Издателство «Советское Радио», Москва 1970