Radar de onda contínua com modulação de frequência (radar FMCW)

eco recebido
Figura 1: Variando com um sistema FMCW

Radar de onda contínua com modulação de frequência (radar FMCW)
O radar FMCW (Radar de onda contínua modulada por frequência = radar FMCW) é um tipo especial de sensor de radar que irradia potência de transmissão contínua como um radar de onda contínua simples (CW-Radar). Em contraste com este radar CW, o radar FMCW pode alterar sua frequência operacional durante a medição: ou seja, o sinal de transmissão é modulado em frequência (ou em fase). Possibilidades de medições de radar através de medições de tempo de execução são tecnicamente possíveis apenas com essas alterações na frequência (ou fase).
Dispositivos simples de radar de onda contínua sem modulação de frequência têm a desvantagem de não poder determinar o alcance do alvo, porque não possui a marca de tempo necessária para permitir que o sistema cronometre com precisão o ciclo de transmissão e recebimento e convertê-lo em alcance. Essa referência de tempo para medir a distância de objetos estacionários, mas pode ser gerada usando a modulação de frequência do sinal transmitido. Neste método, um sinal é transmitido, o que aumenta ou diminui na frequência periodicamente. Quando um sinal de eco é recebido, essa mudança de frequência recebe um atraso Δt (por mudança de tempo de execução) semelhante à técnica de radar de pulso. No radar de pulso, no entanto, o tempo de execução deve ser medido diretamente. No radar FMCW são medidas as diferenças de fase ou frequência entre o sinal realmente transmitido e o recebido.
Os recursos básicos do radar FMCW são:
- Capacidade de medir faixas muito pequenas em relação ao alvo (a faixa mínima medida é comparável ao comprimento de onda transmitido);
- Capacidade de medir simultaneamente o alcance do alvo e sua velocidade relativa;
- Precisão muito alta da medição de faixa;
- O processamento do sinal após a mistura é realizado em uma faixa de baixa frequência, simplificando consideravelmente a realização dos circuitos de processamento;
- Segurança contra a ausência de radiação de pulso com alta potência de pico.
Princípio da medição
As características do radar FMCW são:
- A medição da distância é realizada comparando a frequência do sinal recebido com uma referência (geralmente diretamente o sinal de transmissão).
- A duração da forma de onda transmitida T é substancialmente maior que a necessária tempo de recebimento da faixa de medição da distância instalada.
A distância R ao objeto refletido pode ser determinada pelas seguintes relações:
.print.png)
.png)
(1)
- c0 = velocidade da luz = 3·108 m/s
- Δt = tempo de atraso [s]
- Δf = diferença de frequência medida [Hz]
- R = distância entre a antena e o objeto refletor [m]
- df/dt = mudança de frequência por unidade de tempo
Se a mudança na frequência for linear em uma ampla faixa, a faixa do radar poderá ser determinada por uma simples comparação de frequência. A diferença de frequência Δf é proporcional à distância R. Como apenas a quantidade absoluta da diferença de frequência pode ser medida (números negativos para a frequência não existem), os resultados estão em uma frequência linearmente crescente igual a uma frequência decrescente (em um cenário estático: sem efeitos Doppler).
Se o objeto refletor tiver uma velocidade radial em relação à antena receptora, o sinal de eco receberá uma frequência Doppler fD (causada pela velocidade). O radar mede não apenas a diferença de freqüência Δf com a frequência atual (causada pelo tempo de execução), mas também uma frequência Doppler fD (causada pela velocidade). O radar mede, dependendo da direção do movimento e da direção da modulação linear, apenas a soma ou a diferença entre a frequência da diferença como portadora da informação de distância e a frequência Doppler como portadora da informação de velocidade. Se a medição for feita durante a borda de queda de um dente de serra (veja a parte direita da Figura 3), a frequência Doppler fD é subtraída pela alteração da frequência de tempo de execução. Se o objeto refletido estiver se afastando do radar, a frequência do sinal de eco será reduzida pela frequência Doppler adicionalmente . Agora, se a medição for realizada com um dente de serra, como mostra a Figura 1, o sinal de eco recebido (o gráfico verde) será movido não apenas pelo tempo de execução para a direita, mas também pela frequência Doppler reduzida. A frequência da diferença medida Δf é, pela frequência Doppler, fD maior que o tempo real de execução.
Faixa máxima e resolução da faixa
Por escolha adequada do desvio de frequência por unidade de tempo, pode-se determinar a resolução do radar e, por escolha da duração do aumento da frequência (a borda mais longa do dente de serra vermelho na Figura 1), pode ser determinado o valor máximo não- faixa ambígua. O deslocamento máximo de frequência e a inclinação da aresta podem variar dependendo das capacidades do circuito implementado da tecnologia.
A faixa máxima inequívoca é determinada pela sobreposição temporal necessária do sinal recebido (atrasado) com o sinal transmitido. Isso geralmente é muito maior que a faixa energética, ou seja, as limitações da perda de espaço livre.
Para a resolução de alcance de um radar FMCW, a largura de banda BW do sinal transmitido é decisiva (como no chamado radar chirp). No entanto, as possibilidades técnicas da Transformação rápida de Fourier são limitadas no tempo (isto é, pela duração do dente de serra Τ ). A resolução do radar FMCW é determinada pela mudança de frequência que ocorre dentro desse prazo.
.print.png)
.png)
(2)
- ΔfFFT = menor diferença de frequência mensurável
- d(f)/d(t) = Intensidade do desvio de frequência
- fup = frequência superior (final do dente de serra)
- fdwn = frequência mais baixa (início do dente de serra)
A recíproca duração do pulso dente de serra leva à menor frequência possível detectável. Isso pode ser expresso na equação (1) como |Δf | e resulta em uma capacidade de resolução de alcance do radar FMCW.
Por exemplo, um determinado radar com uma mudança de frequência linear com duração de 1 ms, pode fornecer um alcance máximo inequívoco de menos de 150 km, teoricamente. Esse valor resulta da sobreposição necessariamente restante do sinal de transmissão com o sinal de eco (consulte a Figura 1) para obter tempo suficiente para medir uma frequência de diferença. A maior parte dessa faixa nunca pode ser alcançada devido à baixa potência do transmissor. Assim, sempre resta tempo suficiente para medir a frequência da diferença.
Se a mudança de frequência máxima possível para a modulação do transmissor for 250 MHz, dependendo dessa inclinação da borda, um tempo de atraso de 4 ns obtém uma diferença de frequência de 1 kHz. Isso corresponde a uma resolução de alcance de 0,6 m.
Este exemplo mostra de maneira impressionante a vantagem do radar FMCW: Um radar de pulso deve medir essa diferença de atraso de 4 ns, resultando em uma complexidade técnica considerável. Uma diferença na frequência de 1 kHz, no entanto, é muito mais fácil de medir porque está na faixa de áudio.
Como em qualquer radar no radar FMCW, além da largura de banda alocada, a largura de feixe da antena determina a resolução angular na detecção de objetos.
Padrão de modulação

Figura 2: Padrão de modulação comum para um radar FMCW
Figura 2: Padrão de modulação comum para um radar FMCW
Existem vários padrões de modulação possíveis que podem ser usados para diferentes fins de medição:
- Modulação dente de serra
Esse padrão de modulação é usado em uma faixa relativamente grande (distância máxima) combinada com uma influência desprezível da frequência Doppler (por exemplo, um radar de navegação marítima). - Modulação triangular
Essa modulação permite fácil separação da diferença de freqüência Δf da frequência Doppler fD - Modulação de onda quadrada (chaveamento simples de mudança de frequência,
FSK)
Esta modulação é usada para uma medição de distância muito precisa a curta distância, por comparação de fase das duas frequências de sinal de eco. Ele tem a desvantagem de que os sinais de eco de vários alvos não podem ser separados um do outro e que esse processo permite apenas uma pequena faixa de medição inequívoca. - Modulação escalonada (tensão da escada)
Isso é usado para medições interferométricas e expande a faixa de medição inequívoca. - Modulação sinusoidal
Formas de modulação sinusoidal foram usadas no passado. Isso pode ser facilmente realizado por um motor que gira uma placa de capacitor na câmara de ressonância do oscilador do transmissor. O radar então usou apenas a parte relativamente linear da função seno perto do cruzamento zero.
Mudança de frequência linear dente de serra
Em uma mudança de frequência linear em dente de serra (veja a Figura 1), um atraso deslocará o sinal de eco no tempo (isto é, para a direita na imagem). Isso resulta em uma diferença de frequência entre a frequência real e o sinal de eco atrasado, que é uma medida da distância do objeto refletido. Essa diferença de frequência é chamada de „frequência de batida”. Uma frequência Doppler ocorrente agora moveria a frequência de todo o sinal de eco para cima (movendo-se em direção ao radar) ou para baixo (afastando-se do radar).
Nesta forma de modulação, o receptor não tem como separar as duas frequências. Assim, a frequência Doppler ocorrerá apenas como um erro de medição no cálculo da distância. Na escolha de uma varredura de frequência ideal, pode-se considerar a priori que as frequências esperadas do Doppler sejam tão pequenas quanto a resolução ou, pelo menos, que o erro de medição seja o menor possível.
.print.jpg)
recebido
Figura 3: Relacionamentos com padrão de modulação triangular
.png)
Será o caso, por exemplo, do radar de navegação marítima: os barcos se movimentam na área costeira a uma velocidade limitada, um em relação ao outro, talvez com um máximo de 10 metros por segundo. Nesta faixa de frequência desses conjuntos de radar (principalmente na banda X), a freqüência máxima esperada do Doppler é de 666 Hz. Se o processamento do sinal do radar usar uma resolução na faixa de quilómetros por metro, essa frequência do Doppler será desprezível. Como as velocidades de decolagem e aterrissagem em um aeródromo de até 200 m/s, um radar FMCW de navegação marítima teria problemas para ver esses aviões. O erro de medição causado pela frequência Doppler pode ser maior que a distância a ser medida. Os sinais de alvo apareceriam teoricamente a uma distância negativa, isto é, antes do início da deflexão na tela.
Triangular frequency changing
echo signal
Figure 3: Relationships with triangular modulation pattern
Em uma mudança de frequência de formato triangular, uma medição de distância pode ser realizada tanto na borda ascendente quanto na descendente. Na Figura 3, um sinal de eco é deslocado devido ao tempo de execução comparado ao sinal de transmissão para a direita. Sem uma frequência Doppler, a quantidade da diferença de frequência durante a borda ascendente é igual à medida durante a borda descendente.
Uma frequência Doppler muda o sinal de eco em altura (gráfico verde na figura 3). Aparece a soma da diferença de frequência Δf e a frequência Doppler fD na borda ascendente e a diferença entre essas duas frequências na borda descendente. Isso abre a possibilidade de fazer uma determinação precisa da distância, apesar da mudança de frequência causada pela frequência Doppler, que consiste na média aritmética das duas partes das medidas em diferentes arestas do padrão triangular. Ao mesmo tempo, a frequência precisa do Doppler pode ser determinada a partir de duas medições. A diferença entre as duas frequências de diferença é duas vezes a frequência do Doppler. Como as duas frequências diferenciais, no entanto, não estão disponíveis simultaneamente, essa comparação requer processamento de sinal digital, com armazenamento intermediário dos resultados medidos.
A frequência ajustada pela frequência Doppler para a determinação da distância e a frequência Doppler de um alvo em movimento são calculadas por:
.print.png)
.png)
(3),(4)
- f (R) = frequência como medida da determinação da distância
- fD = frequência Doppler como uma medida da medição de velocidade
- Δf1 = diferença de frequência na borda ascendente
- Δf2 = diferença de frequência na aresta descendente

Figura 4: Alvos fantasmas, solução gráfica

Figura 4: Alvos fantasmas, solução gráfica
A frequência f (R) pode então ser usada na fórmula (1) para calcular a distância exata.
No entanto, esse método tem a desvantagem de que, se aparecer uma pluralidade de objetos refletivos, as frequências medidas de Doppler não poderão ser associadas exclusivamente a um alvo. A atribuição da frequência Doppler errada a um destino na distância errada pode levar a alvos fantasmas. Na figura 4 é mostrada uma solução gráfica. A posição de um primeiro alvo resulta das funções [-Δf1]1 + fD e [+Δf2]1 - fD. A interseção das duas linhas é a posição do alvo 1. Quando um segundo objeto ([……]2) com uma segunda frequência Doppler aparece. Só então os dois pares de inclinações lineares dão um total de quatro interseções, duas das quais são alvos fantasmas. A posição dos alvos fantasmas também depende da inclinação do padrão de modulação. Portanto, o problema pode ser resolvido medindo-se ciclos com diferentes inclinações de inclinação: então, devem ser mostrados apenas os alvos, cujas coordenadas são medidas nos dois ciclos na mesma posição.
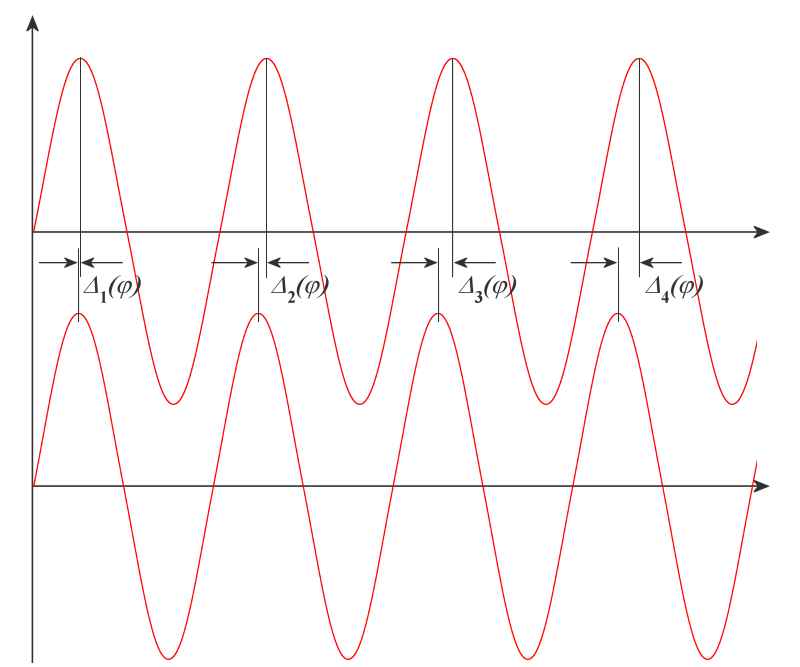
Figura 5: A diferença de fase Δn(φ) é uma medida de quanto comprimento de onda é igual ao dobro da distância (ida e volta)

Figura 5: A diferença de fase Δn(φ) é uma medida de quanto comprimento de onda é igual ao dobro da distância (ida e volta)
Chaveamento por mudança de frequência (FSK)
O transceptor é simplesmente alternado com uma tensão de controle retangular entre duas frequências de transmissão. Existem duas maneiras principais de processar os sinais de saída do transceptor. A primeira possibilidade é medir a duração da mudança de frequência. Um sinal aparece na saída do transceptor, cujo envelope é um pulso que possui uma determinada largura de pulso como uma medida da distância. No entanto, essa medição é uma pura perda de tempo, como a medição do radar de pulso e, portanto, é imprecisa ou tecnologicamente muito complexa.
Uma segunda possibilidade é comparar o ângulo de fase dos sinais de eco das duas frequências. Durante a parte superior do pulso retangular, o radar opera na primeira frequência e, durante o período de interpulso, o radar opera na segunda frequência. Durante esses tempos na faixa de milissegundos, o radar funcionará como no método de radar CW. A saída do down mixer (consulte o diagrama de blocos), uma tensão DC aparece como uma medida da diferença de fase entre o sinal de recepção e seu sinal de transmissão. A diferença de fase entre os sinais de eco de diferentes frequências de transmissão (tecnicamente: a diferença de tensão na saída do mixer) é uma medida da distância. Novamente, os dois sinais de eco não são medidos simultaneamente, os valores de tensão devem ser armazenados digitalmente.
No entanto, devido à periodicidade da onda senoidal, esse método possui apenas uma distância de medição inequívoca muito limitada, que é mesmo nessa faixa; ali, a diferença de fase entre os dois sinais de eco é menor que o comprimento de meia onda. Uma diferença de frequência de 20 MHz entre duas frequências de transmissão resulta em uma faixa de medição inequívoca de 15 metros. Vários alvos a curta distância não podem ser separados, pois apenas um ângulo de fase pode ser medido na saída do estágio do misturador. Vários alvos se sobrepõem a apenas uma única tensão de saída na qual domina o alvo mais forte.
Se os dois métodos de análise (no tempo e na fase) forem aplicados simultaneamente, a determinação da distância dependente do tempo pode ser usada como uma avaliação aproximada. Os resultados detalhados da análise de fase podem ser multiplicados até que o resultado esteja próximo o suficiente da distância da medição do tempo. A faixa máxima inequívoca e inequívoca da medição da diferença de fase é assim evitada.
Mudança de frequência escalonada
Em geral, aplicam-se as mesmas vantagens e desvantagens de uma modulação de frequência escalonada que o método com uma modulação de onda quadrada. No entanto, o radar FMCW agora está trabalhando com várias frequências sucessivas. Em cada uma dessas frequências individuais, um ângulo de fase do sinal de eco é medido. A faixa de medição inequívoca aumenta consideravelmente, no entanto, já que agora as relações de fase entre várias frequências devem ser repetidas para criar ambiguidades.
Este método será muito interessante se ressonâncias para frequências de componentes individuais puderem ser observadas nas irregularidades do objeto refletido. Este método de medição é então um campo de interferometria.
Diagrama de blocos de um sensor de radar FMCW

Figure 6: Block Diagram of an FMCW radar sensor

Figure 6: Block Diagram of an FMCW radar sensor (interactive picture)
Um radar FMCW consiste essencialmente no transceptor e uma unidade de controle com um microprocessador. O transceptor é um módulo compacto e geralmente inclui a antena de patch implementada como antena de transmissão e recepção separada. A alta frequência é gerada por um oscilador controlado por tensão que alimenta diretamente a antena transmissora ou sua potência é adicionalmente amplificada. Uma parte da alta frequência é acoplada e alimentada a um misturador que converte o sinal de eco recebido e amplificado na banda base.
A placa de controle contém um microprocessador que controla o transceptor, também converte os sinais de eco em formato digital (geralmente via cabo USB), garantindo a conexão com um computador pessoal ou laptop. Usando um conversor digital para analógico, a tensão de controle é fornecida ao controle de frequência. A tensão de saída do estação de mistura é digitalizada.
Se estiver usando uma única antena, devido ao método (transmissão e recepção simultâneas), o radar FMCW precisa de um circulador de ferrite para separar os sinais de transmissão e recepção. Nas antenas de patch atualmente usadas, no entanto, o uso de antenas de transmissão e recepção separadas é muito mais barato. Em um substrato comum são colocados diretamente um sobre o outro, um conjunto de antenas transmissoras e um conjunto de antenas receptoras. A direção da polarização é girada 180° uma contra a outra com frequência. Freqüentemente é reduzido por uma placa de blindagem adicional uma „conversa cruzada” direta (isto é, um feedback positivo direto entre as duas antenas). Como a medição é realizada como uma diferença de frequência entre o sinal de transmissão e o recebimento, o sinal produzido por esse acoplamento direto pode ser suprimido devido à diferença de frequência muito pequena.
Em aplicações de radar CW puro, apenas a frequência Doppler deve ser processada. Isso inclui frequências de até 16,5 kHz usando um transceptor FMCW operando em K-Band (cerca de 24 GHz) e as velocidades esperadas para gravação são de até 360 quilômetros por hora. Portanto, como microprocessador, pode ser usado um processador de áudio estéreo simples, produzido em grandes quantidades e usado, por exemplo, em placas de som para computadores domésticos. Mesmo no método FSK (modulação de padrão retangular), esse processador pode ser usado condicionalmente.
Por outro lado, o receptor em um aplicativo de radar FMCW deve ser capaz de processar toda a mudança de frequência do transmissor. Assim, são esperadas frequências de até 250 MHz no sinal recebido. Isso tem um impacto significativo na largura de banda do amplificador subsequente e na frequência de amostragem necessária do conversor analógico-digital. Assim, a placa de processamento de sinal do radar FMCW é consideravelmente mais cara em relação ao radar CW.
Atualmente, existem no mercado muitos sensores de radar FMCW ou módulos de radar FMCW baratos, que contêm um transceptor completo com conjunto de antenas de remendo integrado, como o chamado “front-end” do dispositivo de radar FMCW. Esses módulos incluem como núcleo normalmente o módulo MMIC TRX_024_xx (consulte a folha de dados) do Silicon Radar com uma potência de até 6 dBm. Este chip opera na banda K (24,0… 24,25 GHz) e pode ser usado como um sensor para medições de velocidade e distância. A modulação ou uma alteração de frequência depende de uma tensão de controle e é conectada a um circuito externo, que é uma tensão fixa (então opera o módulo como um radar CW) ou é controlado por um processador e com base na tensão de saída de um conversor analógico-digital. O sinal de saída do mixer geralmente é fornecido como sinais I e Q e precisa ser substancialmente amplificado antes da conversão analógico-digital.
Radar FMCW para imagens

Figura 7: O conjunto de antenas de patch de um radar de navegação FMCW marítimo no banda X

Este método de radar é usado no chamado Broadband Radar™ como radar de navegação para aplicações marítimas. Aqui, a varredura de frequência é interrompida, após atingir a faixa máxima de medição. Portanto, o sinal de transmissão se parece mais com um sinal de radar de pulso usando modulação intrapulse. Essa quebra não tem influência direta na distância máxima de medição aqui. No entanto, é necessário ler os dados medidos de um buffer e transmiti-los sem perdas através da linha de banda estreita para a unidade de exibição. Devido à sua operação - a comparação de frequência do sinal de eco recebido com o sinal transmitido, que está disponível em toda a distância - permanece um radar FMCW, apenas é desligado intermitentemente por alguns milissegundos, pois simplesmente não são necessários mais dados.
Um radar de imagem deve realizar uma medição de distância para cada ponto no monitor. Uma resolução de faixa mais dependente aqui do tamanho de um pixel dessa tela e da capacidade do processamento de sinal de fornecer os dados na velocidade necessária. É necessária uma tela de alta resolução com a resolução de pixels, para que, no mínimo, para cada diferença de alcance, dois pixels estejam disponíveis, portanto, mesmo que o sinal medido esteja exatamente entre a posição de dois pixels, ambos os pixels „acenderão” e movimento do alvo, o número de pixels usados e, portanto, o brilho relativo do caractere alvo é o mesmo.
Com o exemplo acima como exemplo Broadband-Radar™ com uma mudança de frequência de 65 MHz por milissegundo, você pode obter boas medições.
- Para uma medição de tempo de execução inequívoca com este radar, é mensurável apenas um máximo de 500 µs (consulte a Figura 1), o que corresponde a um alcance máximo possível de 75 km.
- O desvio de frequência de 65 MHz por milissegundo corresponde a uma alteração de frequência de 65 hertz por nanossegundo. Se os seguintes filtros são tecnicamente capazes de resolver diferenças na frequência de 1 kHz, é possível medir diferenças de tempo de 15 nanossegundos, o que corresponde a uma resolução de alcance de cerca de 2 metros.
- Se o máximo processável pela frequência da diferença de avaliação for de dois megahertz, que realiza um microcomputador fácil de um chip, é possível medir distâncias de até 4000 metros. (Sem um microcontrolador seria necessário 4000 filtros individuais diferentes operando em paralelo.)
- Devido ao método de medição, aqui está a precisão da medição aproximadamente igual à resolução da faixa e ainda é limitada pela resolução da escala da tela.
O radar FMCW pode, assim, obter uma alta resolução espacial com pouco esforço técnico. Para obter a mesma resolução, um radar pulsado precisa capaz de medir o tempo na região de nanossegundos. Isso significaria que a largura da banda desse transmissor de radar de pulso deve ser de pelo menos 80 MHz e, para digitalização, o sinal de eco precisa de uma taxa de amostragem de 166 MHz.
Radar FMCW sem imagem

Figura 8: Exibição analógica do altímetro de radar
O resultado da medição deste radar FMCW é apresentado como um valor numérico para um instrumento indicador ou digitalizado como exibição alfanumérica em uma tela. Pode ser medido apenas um único objeto dominante, mas este com uma precisão muito alta até a faixa do centímetro. Este método de determinação da distância é, por exemplo, usado no rádio altímetro da aeronave.
Até um instrumento indicador analógico pode servir como um indicador para um radar FMCW (veja a Figura 8). O medidor de bobina móvel possui uma impedância indutiva maior para frequências mais altas e, portanto, exibe um valor dependente da frequência, que é, no entanto, não linear.