Frekvenčně modulovaný kontinuální radar

signál
Obrázek 1: Určování vzdálenosti pomocí radaru FMCW

Frekvenčně modulovaný kontinuální radar
Frekvenčně modulovaný kontinuální radar (Frequency-Modulated Continuous Wave radar = FMCW radar) je speciální typ radarového senzoru, který vysílá spojitý přenosový signál jako jednoduchý radar kontinuálního vlnění (CW radar). Na rozdíl od tohoto CW radaru může FMCW radar během měření měnit svou pracovní frekvenci: to znamená, že vysílaný signál je frekvenčně modulován. Tyto změny frekvence technicky umožňují další možnosti měření prostřednictvím měření doby letu.
Jednoduché radary kontinuálního vlnění (CW radary) mají tu nevýhodu, že nemohou měřit vzdálenost kvůli absenci časové reference. Takovou časovou referenci pro měření vzdálenosti stacionárních objektů však lze vytvořit pomocí frekvenční modulace vysílaného signálu. Při této metodě se vysílá signál, jehož frekvence se periodicky mění. Pokud je přijímán signál s ozvěnou, pak má tato změna frekvence časový posun Δt jako u pulzního radaru.
Základní charakteristiky radaru FMCW jsou:
- Schopnost měřit velmi malé vzdálenosti cílů (minimální rozsah měření je v rozsahu vlnových délek);
- Vzdálenost a radiální rychlost lze měřit současně;
- Velmi vysoká přesnost měření rozsahu;
- Zpracování signálu se provádí po smíchání v nízkofrekvenčním rozsahu, což výrazně zjednodušuje obvody;
- Vysoká provozní spolehlivost díky absenci vysokého pulzního výkonu.
Princip měření
Charakteristika radaru FMCW je:
- měření vzdálenosti se provádí porovnáním frekvence přijímaného signálu s referenčním signálem (obvykle přímo vysílaným signálem).
- doba trvání modulační periody T je podstatně delší než požadovaná doba Δt (doba šíření) pro instalovaný rozsah měření vzdálenosti.
.print.png)
.png)
(1)
- c0 = rychlost světla = 3·108 m/s
- Δt = doba běhu [s]
- Δf = naměřený rozdíl frekvencí [Hz]
- R = vzdálenost anténa - objekt (země) [m]
- df/dt = odchylka frekvence za jednotku času
Pokud je změna frekvence lineární v širokém rozsahu, lze vzdálenost v tomto rozsahu určit jednoduchým porovnáním frekvence Δf. Vzhledem k tomu, že je měřitelná pouze velikost rozdílu frekvencí, jsou ve statickém scénáři výsledky rovny klesající změně frekvence pro lineárně rostoucí změnu frekvence.
Pokud má odrážející se objekt radiální rychlost vzhledem k vysílací/přijímací anténě, je na echo signál kromě rozdílové frekvence Δf oproti aktuální vysílací frekvenci (způsobené dobou průchodu) aplikována Dopplerova frekvence fD (způsobená rychlostí). Radar pak v závislosti na směru pohybu a směru lineární modulace měří pouze součet nebo rozdíl mezi rozdílovou frekvencí jako nosičem informace o dosahu a dopplerovskou frekvencí jako nosičem informace o rychlosti. Pokud se odrážející objekt vzdaluje od radaru, frekvence echosignálu se sníží o dopplerovskou frekvenci. Pokud je nyní měření prováděno pomocí pilového zubu, jak je znázorněno na obr. 1, pak je přijímaný signál posunut nejen doprava o dobu průchodu, ale také směrem dolů o dopplerovskou frekvenci. Naměřená rozdílová frekvence Δf je větší o dopplerovskou frekvenci fD, než by měla být podle doby běhu. Pokud se měření provádí s klesající hranou pilového zubu (viz obr. 3), pak se dopplerovská frekvence fD odečítá od změny frekvence o dobu průchodu.
Dosah a rozlišovací schopnost
Rozlišovací schopnost lze určit vhodnou volbou odchylky frekvence za jednotku času a maximální možný rozsah měření lze určit dobou trvání nárůstu frekvence. Doba trvání lineárního nárůstu frekvence určuje maximální možnou jedinečnou měřicí vzdálenost. Strmost lineárního nárůstu určuje rozlišovací schopnost a přesnost měření vzdálenosti. Maximální nárůst frekvence a sklon lze měnit podle možností technicky realizovaného obvodu.
Maximální možný dosah je dán nezbytným časovým překrytím přijímaného signálu s vysílaným signálem. Ta je obvykle mnohem větší než energetický rozsah, tj. omezení útlumem ve volném prostoru.
Pro rozlišovací schopnost FMCW radaru (stejně jako u tzv. chirpového radaru) je rozhodující šířka pásma BW vysílaného signálu. Jedná se jednoduše o rozdíl mezi horní a dolní mezní frekvencí vysílaného signálu. Možnosti rychlé Fourierovy transformace jsou omezeny časovými limity (zde dobou trvání pilového zubu Τ ). Rozlišovací schopnost radaru FMCW je tedy určena změnou frekvence, ke které dochází v rámci tohoto časového limitu.
.print.png)
.png)
(2)
- ΔfFFT = nejmenší měřitelný rozdíl frekvencí
- d(f)/d(t) = frekvenční odchylka
- fup = horní mezní frekvence
- fdwn = dolní mezní frekvence
Reciproční hodnota doby trvání pilového impulsu tak dává nejmenší možnou detekovatelnou frekvenci. To lze dosadit do vzorce (1) jako |Δf | a získat tak rozlišení dosahu FMCW radaru. Problémem se však stává, že doba trvání pilového zubu musí být dostatečná i jako doba pro Fourierovu transformaci. Čím déle lze rychlou Fourierovu transformaci použít, tím přesnější je výsledek. To závisí především na šířce pásma: Jak dlouho může být tato změna frekvence za časovou jednotku d(f)/d(t) aplikována, aniž by byly překročeny hranice použitého frekvenčního pásma. Další časová omezení mohou být způsobena nepříznivým (příliš krátkým) překrytím okrajů pilových zubů použitých pro měření.
Například radar s lineárním nárůstem frekvence po dobu 1 ms má teoreticky maximální možný jednoznačný rozsah měření v čase menší než 150 km. To vyplývá z nutně zbývajícího překrytí vysílaného signálu s echosignálem (viz obrázek 1), aby bylo možné měřit rozdílovou frekvenci. Ve většině případů nelze tohoto rozsahu měření z hlediska energie nikdy dosáhnout. To ponechává dostatek času pro měření rozdílové frekvence.
Pokud je maximální frekvenční odchylka modulace vysílače 250 MHz, znamená to časový rozdíl 4 ns pro rozdíl frekvencí 1 kHz. To pak odpovídá rozlišení vzdálenosti 0,6 m.
Tento příklad působivě ukazuje výhodu radaru FMCW: pulzní radar musí měřit tyto 4 ns rozdílu doby průchodu, což znamená značné technické úsilí. Na druhou stranu je mnohem snazší měřit frekvenční rozdíl 1 kHz ve zvukovém rozsahu.
Stejně jako u jiných radarů závisí úhlové rozlišení radaru FMCW na směrovosti (pološířce) použité antény.
Modulační vzor

Obrázek 2: Běžné modulační vzory pro radar FMCW
Obrázek 2: Běžné modulační vzory pro radar FMCW
Je možné použít několik modulačních vzorů, které lze použít pro různé účely měření:
- Pilovitá modulace
Tato modulace se používá pro relativně velký rozsah měření (maximální vzdálenost) se zanedbatelným vlivem dopplerovské frekvence (např. pro námořní navigační radar). - Trojúhelníková modulace
Tato modulace umožňuje jednoduché oddělení rozdílové frekvence Δf od Dopplerovy frekvence fD - modulace čtvercovou vlnou (einfache Frequenzumtastung,
FSK)
(jednoduchý klíčování s frekvenčním posunem, FSK) Tato modulace se používá pro velmi přesné měření vzdálenosti v blízkém dosahu na základě porovnání fází obou frekvencí echo signálu. Její nevýhodou je, že echo signály několika cílů nelze od sebe oddělit a že tato metoda umožňuje pouze malé jednoznačné měření vzdálenosti. - Stupňovitá modulace
Interferometrická měření rozšiřují rozsah jednoznačných měření. - Sinusová modulace
V minulosti se používaly také sinusové modulační formy. Ty by mohly být realizovány jednoduše pomocí motoru, který by otáčel deskou kondenzátoru v rezonanční komoře vysílacího oscilátoru. Pak byla použita pouze relativně lineární část sinusové funkce v blízkosti průsečíku nuly.
Lineární změna frekvence ve tvaru pilového zubu
Při lineární změně frekvence ve tvaru pilového zubu (viz obrázek 1) je signál echa posunut v čase (tj. na obrázku doprava) o dobu běhu. Výsledkem je frekvenční rozdíl mezi aktuální vysílací frekvencí a zpožděným signálem ozvěny, který je mírou vzdálenosti odrážejícího se objektu. Vzniklá dopplerovská frekvence by nyní posunula celý echo signál frekvenčně buď nahoru (pohyb směrem k radaru), nebo dolů (pohyb směrem od radaru).
Při této formě modulace nemá přijímač možnost oddělit obě frekvence. Dopplerova frekvence se proto projeví pouze jako chyba měření při výpočtu dosahu. Při volbě optimální frekvenční odchylky lze od počátku zohlednit, aby očekávané dopplerovské frekvence byly co nejmenší v porovnání s rozlišovací schopností, nebo aby alespoň chyba měření zůstala co nejmenší.
.print.jpg)
signál
Bild 3: Zusammenhänge bei dreieckförmiger Modulation
.png)
To se týká například námořních navigačních radarů: Vodní plavidla se v pobřežní oblasti pohybují omezenou rychlostí, maximálně však 10 metrů za sekundu vůči sobě navzájem. Ve frekvenčním pásmu těchto radarů (obvykle pásmo X) je tedy maximální očekávaná dopplerovská frekvence 666 Hz. Pokud se při zpracování radarového signálu používá kilohertzové rozlišení na metr, je tato dopplerovská frekvence zanedbatelná. Námořní navigační radar FMCW na letišti by měl při vzletových a přistávacích rychlostech až 200 m/s, které se zde vyskytují, potíže tato letadla vůbec vidět, protože chyba měření způsobená Dopplerovou frekvencí může být větší než vzdálenost, kterou je třeba během přiblížení změřit. Značka cíle by se pak teoreticky měla na obrazovce objevit v záporné vzdálenosti, tj. před začátkem vychýlení.
Trojúhelníková změna frekvence
signál
Obrázek 3: Vzájemné vztahy s trojúhelníkovou modulací
Při trojúhelníkové změně frekvence lze měřit vzdálenost jak na vzestupné, tak na sestupné hraně. Signál ozvěny je v obraze posunut doprava vzhledem k aktuálnímu vysílanému signálu v důsledku doby šíření. Bez dopplerovské frekvence se velikost rozdílu frekvencí Δf na vzestupné hraně rovná měření na sestupné hraně.
Dopplerovská frekvence posouvá echo signál v obraze do výšky. Součet rozdílu frekvencí Δf a Dopplerovy frekvence fD se objeví na vzestupné hraně, zatímco rozdíl obou frekvencí se objeví na sestupné hraně. To otevírá možnost přesného určení vzdálenosti i přes frekvenční posun způsobený Dopplerovou frekvencí, která se pak skládá z aritmetického průměru obou měření. Zároveň lze z obou měření určit přesnou dopplerovskou frekvenci. Výsledkem rozdílu obou rozdílových frekvencí je dvojnásobná Dopplerova frekvence. Protože však obě rozdílové frekvence nejsou k dispozici současně, vyžaduje toto srovnání digitální zpracování signálu.
Dopplerovsky upravená frekvence pro určení dosahu i dopplerovská frekvence pohybujícího se cíle se vypočítá podle:
.print.png)
.png)
(3),(4)
- f (R) = frekvence jako míra pro měření vzdálenosti
- fD = Dopplerova frekvence jako měřítko pro měření rychlosti.
- Δf1 = rozdíl frekvencí na náběžné hraně
- Δf2 = rozdíl frekvencí na sestupné hraně

Obr. 4: Cíle duchů, grafické řešení

Obr. 4: Cíle duchů, grafické řešení
Frekvenci f (R) pak lze dosadit jako |Δf | do vzorce (1) a vypočítat přesnou vzdálenost.
Tato metoda má však tu nevýhodu, že u několika odrážejících se objektů nelze naměřené dopplerovské frekvence jednoznačně přiřadit k cíli. Přiřazení nesprávné dopplerovské frekvence cíli v nesprávné vzdálenosti může vést ke vzniku „duchů“. Obrázek 4 ukazuje grafické řešení. Poloha prvního cíle vyplývá z funkcí [-Δf1]1 + fD [+Δf2]1 - fD. Průsečík těchto dvou přímek představuje polohu cíle 1. Pokud se přidá druhý cíl ([……]2), obě dvojice přímek vedou k celkem čtyřem průsečíkům, z nichž dva jsou cíle duchů. Poloha těchto přízračných cílů závisí také na sklonu modulačního tvaru. Problém lze tedy vyřešit měřením cyklů s různou strmostí hran: zobrazí se pak pouze ty cíle, jejichž souřadnice ukazují na stejnou polohu v obou měřicích cyklech.
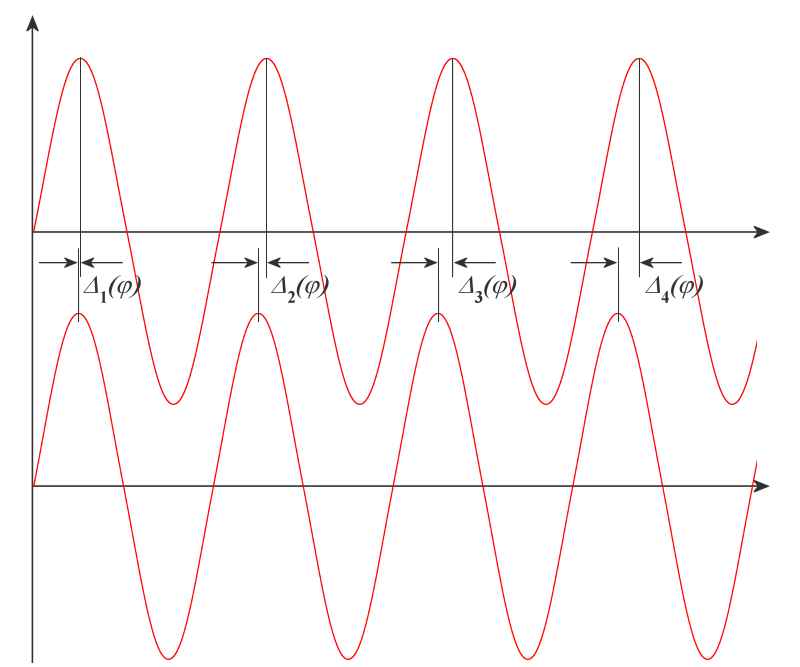
Obrázek 5: Fázový rozdíl Δn(φ) je mírou toho, kolikrát je vlnová délka dvakrát větší než vzdálenost (směrem ven a zpět).

Obrázek 5: Fázový rozdíl Δn(φ) je mírou toho, kolikrát je vlnová délka dvakrát větší než vzdálenost (směrem ven a zpět).
Obdélníková změna frekvence
Tato metoda se také nazývá radar FMCW s frekvenčním posunem (Frequency Shift Keying, FSK). Vysílač se jednoduše cyklicky přepíná mezi dvěma přenosovými frekvencemi pomocí napětí se čtvercovou vlnou. Existují dva základní způsoby zpracování výstupního signálu vysílače. První možností je změřit dobu běhu změny frekvence. Na výstupu vysílače se objeví signál, jehož obálku tvoří puls s dobou trvání pulsu jako měřítkem vzdálenosti. Toto měření je však čistě časové měření jako u pulzního radaru a je proto buď nepřesné, nebo technologicky velmi složité.
Druhou možností je porovnat fázovou polohu signálů ozvěny obou frekvencí. V rámci pulzního vrchlíku pracuje radar s 1. vysílací frekvencí, v rámci pulzní pauzy s 2. vysílací frekvencí. Během těchto časů v rozsahu milisekund pracuje radar stejně jako při metodě CW radaru. Na výstupu směšovače dolů (viz blokové schéma) se objeví stejnosměrné napětí jako míra fázového rozdílu mezi jedním přijímacím signálem a jeho vysílacím signálem. Fázový rozdíl mezi dvěma echo signály různých vysílacích frekvencí (odborně: rozdíl napětí na výstupu směšovače) je mírou vzdálenosti. Opět platí, že oba signály echa nejsou přítomny současně, hodnoty napětí musí být uloženy digitálně.
Vzhledem k periodicitě sinusového napětí má však tato metoda jen velmi omezenou jednoznačnou měřicí vzdálenost, která vyplývá z poloviny vlnové délky rozdílu frekvencí obou vysílacích frekvencí. Rozdíl frekvencí 20 MHz vede k jedinečné měřicí vzdálenosti pouhých 15 m. Několik cílů v blízkém dosahu nelze oddělit, protože na výstupu směšovače směrem dolů lze měřit pouze jednu fázovou polohu, která se v případě několika cílů překrývá pouze do jednoho výstupního napětí, kde v nejlepším případě dominuje nejsilnější cíl.
Pokud se použijí obě metody vyhodnocení (časové a fázové) současně, lze pomocí časového vyhodnocení provést hrubé určení vzdálenosti. Plnou vlnovou délku pak lze přičíst k přesnému výsledku vyhodnocení fáze, dokud se výsledek dostatečně nepřiblíží vzdálenosti z měření času. Tím se obchází špatná jednoznačnost měření vzdálenosti při měření fáze.
Kroková změna frekvence
Obecně zde platí stejné výhody a nevýhody jako u metody s obdélníkovou modulací. Radar FMCW však nyní pracuje s několika po sobě jdoucími frekvencemi. Vkaždé ztěchto jednotlivých frekvencí se měří fázová poloha. Vzdálenost jednoznačného měření se však značně zvětšuje, protože nyní je třeba opakovat fázové vztahy mezi několika frekvencemi, aby vznikly nejednoznačnosti.
Tato metoda se stává velmi zajímavou, pokud lze pozorovat rezonance pro jednotlivé dílčí frekvence na nepravidelnostech odrážejícího objektu. Tato metoda měření je pak oborem interferometrie.
Blokové schéma

Obrázek 6: Blokové schéma radaru FMCW

Obrázek 6: Blokové schéma radaru FMCW (interaktivní obrázek)

Obrázek 7: ART Midrange, radar FMCW s oddělenými anténami pro příjem a vysílání
Radar krátkého dosahu FMCW se v podstatě skládá z vysílače a řídicí jednotky s mikroprocesorem. Transceiver je kompaktní sestava a obvykle obsahuje také vysílací a přijímací antény, které jsou konstruovány jako patch antény. Vysokou frekvenci generuje napěťově řízený oscilátor, který buď přímo napájí vysílací anténu, nebo je jeho výkon dodatečně zesílen. Část vysoké frekvence je oddělena a přivedena do směšovače, který smíchá přijímaný a zesílený echo signál dolů do základního pásma.
Řídicí deska obsahuje mikroprocesor, který řídí vysílač, převádí echo signály do digitálního formátu a zajišťuje připojení k počítači (obvykle pomocí kabelu USB). Řídicí napětí pro regulaci frekvence zajišťuje digitálně analogový převodník. Výstupní napětí směšovače je digitalizováno.
Vzhledem k postupu (současný příjem a vysílání) musí feritový cirkulátor při použití jedné antény oddělit vysílací a přijímací cesty. U dnes běžně používaných patch antén je však použití samostatných vysílacích a přijímacích antén mnohem levnější. Vysílací a přijímací anténa jsou namontovány přímo nad sebou jako anténní pole na společném podkladu. Směr polarizace je vůči sobě otočen o 180°. Přídavná stínicí deska často snižuje přímé „přeslechy“ (tj. přímé společné propojení obou antén). Vzhledem k tomu, že měření se provádí jako rozdíl frekvencí mezi vysílacím a přijímacím signálem, může být signál vznikající touto přímou vazbou potlačen kvůli stejné frekvenci.
V čistě CW radarové aplikaci je třeba zpracovávat pouze Dopplerovu frekvenci. U radarového senzoru FMCW pracujícího v pásmu K (přibližně 24 GHz) se jedná pouze o frekvence do maximálně 16,5 kHz, pokud má být detekována rychlost do 360 km/h. Proto zde lze jako mikroprocesor použít jednoduchý stereofonní zvukový procesor, který se ve velkém množství používá například ve zvukových kartách pro domácí počítače. I v případě metody FSK (obdélníková forma modulace) lze takový procesor v omezené míře použít.
Naproti tomu v radarové aplikaci FMCW pro měření dosahu musí být téměř celá frekvenční odchylka vysílače zpracovatelná i v přijímači. To znamená, že v přijímaném signálu lze očekávat frekvence až 250 MHz. To má významný vliv na šířku pásma následných zesilovačů a na potřebnou vzorkovací frekvenci analogově-digitálního převodníku. Proto je deska pro zpracování signálu radaru FMCW podstatně dražší než deska pro zpracování signálu radaru CW.
V současné době je na trhu mnoho levných FMCW radarových modulů nebo FMCW radarových senzorů, které obsahují kompletní vysílač s integrovaným anténním polem jako takzvaný “Front-End“ radarové jednotky. Tyto moduly obvykle obsahují čip MMIC TRX_024_xx (viz datový list) od společnosti Silicon Radar s výstupním výkonem až 6 dBm. Tento čip pracuje v pásmu K (24,0 … 24,25 GHz) a lze jej použít jako senzor pro měření rychlosti a vzdálenosti. Modulace nebo změna frekvence závisí na řídicím napětí a provádí se pomocí externího obvodu, a to buď pevným napětím (pak zařízení pracuje jako CW radar), nebo je řízeno procesorem a vychází z výstupního napětí digitálně-analogového převodníku. Výstupní signál přímého směšovače je obvykle poskytován jako I&Q signál a před analogově-digitálním převodem musí být podstatně zesílen.
Zobrazovací radar FMCW

Obrázek 8: Patch anténní pole navigačního radaru FMCW v pásmu X

Tato radarová metoda se používá v takzvaném Broadband-Radar™ jako navigační radar pro námořní aplikace. Zde se však frekvenční procházení zastaví po dosažení maximální možné vzdálenosti měření. Vysílaný signál se proto podobá spíše pulznímu radaru s vnitropulzní modulací. Tato pauza nemá přímý vliv na maximální možnou vzdálenost měření. Je však nutné načíst mnoho naměřených dat z vyrovnávací paměti a přenést je beze ztrát úzkopásmovým vedením do zaměřovacího zařízení. Vzhledem ke svému způsobu činnosti - frekvenčnímu porovnávání přijímaného signálu ozvěny s vysílaným signálem, který je k dispozici v celém rozsahu posunu - zůstává radarem FMCW; vypíná se pouze na několik milisekund v mezidobí, protože další data prostě nejsou potřeba.
Zobrazovací radarová metoda musí provést měření dosahu pro každý jednotlivý bod na zaměřovači. Rozlišení rozsahu zde tedy závisí spíše na velikosti pixelu této obrazovky a schopnosti zpracování signálu poskytovat data požadovanou rychlostí. Je zapotřebí obrazovka s vysokým rozlišením a potřebným počtem pixelů, přičemž pro každý rozdíl vzdáleností musí být k dispozici alespoň dva pixely, takže i když měřicí signál leží přesně mezi polohou dvou pixelů, oba pixely „svítí“, a pokud se cíl pohybuje, počet použitých pixelů, a tedy i relativní jas cíle, zůstává stejný.
Na příkladu uvedeného radaru Broadband-Radar™ s frekvenční odchylkou 65 MHz za jednu milisekundu lze dosáhnout dobrých hodnot.
- Pro jednoznačné měření doby letu lze měřit maximálně 500 µs (viz obrázek 1), což odpovídá možné vzdálenosti měření maximálně 75 km.
- Odchylka frekvence 65 MHz za milisekundu odpovídá změně frekvence o 65 hertzů za nanosekundu. Pokud jsou následující filtry technicky schopné rozlišit frekvenční rozdíly 1 kilohertz, pak je možné měřit rozdíly v době letu 15 nanosekund, což odpovídá rozlišení vzdálenosti přibližně 2 metry.
- Pokud je maximální rozdílová frekvence, kterou může vyhodnocovací obvod zpracovat, dva megahertzy, což je možné již u nejjednodušších jednočipových mikropočítačů, pak lze měřit vzdálenosti až 4000 metrů. (Bez mikrokontroléru by muselo být paralelně provozováno 4000 různých filtrů).
- Vzhledem k metodě měření je přesnost měření přibližně rovna rozlišení vzdálenosti a je dále omezena rozlišovací schopností stupnice obrazovky.
Tento radar FMCW tak může dosáhnout vysokého prostorového rozlišení s malým technickým úsilím. Aby pulzní radar dosáhl stejného rozlišení, musí být schopen měřit časy v rozsahu nanosekund. To by znamenalo, že šířka pásma vysílače tohoto pulzního radaru musí být nejméně 80 MHz a při digitalizaci echo signálu musí být použita vzorkovací frekvence 166 MHz.
Nezobrazovací radar FMCW

Obrázek 9: Analogové zobrazení radarového výškoměru
Výsledek měření tohoto radaru FMCW se zobrazuje jako číselná hodnota na ukazateli nebo digitalizovaně jako alfanumerické zobrazení na obrazovce. To znamená, že lze měřit pouze jeden dominantní objekt, ale s velmi vysokou přesností až na centimetry. Tento typ určování vzdálenosti se používá například v letadlech jako rádiový výškoměr.
Jako ukazatel výšky radaru FMCW může sloužit i analogový ukazatel (viz obr. 9). Tento přístroj s pohyblivou cívkou má pro vyšší frekvence vyšší indukční impedanci, a proto vykazuje výchylku závislou na frekvenci, která však není lineární.
Zdroje:
- «Теоретическое Основы Радиолокации», Под редакцией профессора Яковa Давидовичa Ширмана, Издателство «Советское Радио», Москва 1970